

 联系我们
联系我们

工博士机器人技术有限公司是一家集研发、生产、销售、技术服务于一体的专注于自动化、智能化设备生产和机器人系统集成应用的科技型企业,与ABB、库卡KUKA、发那科FANUC、安川YASKAWA、欧地希OTC、川崎Kawasaki、遨博AUBO、现代HYUNDAI、电装DENSO、欧姆龙OMRON、爱普生EPSON等机器人公司签订了战略合作关系。
公司业务范围:
◆机器人本体及配套产品销售、机器人应用技术培训服务;
◆机器人在焊接、切割、搬运、激光技术、机床上下料、钣金折弯、锻造等领域的系统集成应用;
◆机器人变位机、导轨、防护工作房、焊接工装夹具等系统周边设备的设计和生产。
地址:上海市嘉定区南翔镇众仁路399号B座20楼2007室(王工:18616566200)
----------------------------------------------------------------------------------------------------------
四) 机器人上电
1)安全措施准备:手套,工作鞋,安全帽,空置机器人电源电缆插头
2)工具准备:万用表,内六角扳手,十字螺丝刀,夹线钳,金属接头,电工胶带,扎带
3)电源电缆准备:四芯线(单芯2.5mm2 以上)
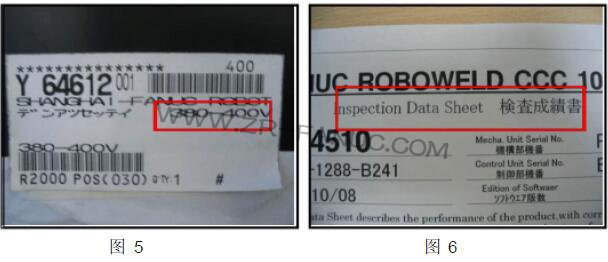
4)电源准备:交流3 相电源(火线+地线,不需要零线),具体电压参看控制器门板上的标签以及机器人的Inspection data shee功t, 率视机器人型号进行确认(参见图5,图6)
5)使用夹线钳将金属接头装在电缆末端并用电工胶带将导体裸露处包好(参见图7)

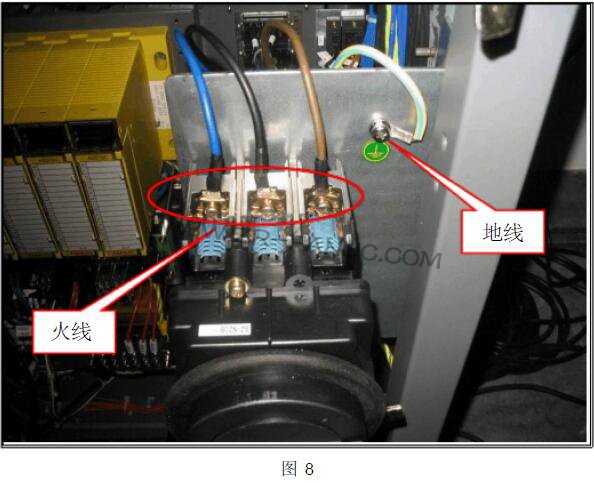
6)将电源电缆安装在机器人BRAKER 的上装头(不分相位) (参见图8,图9)

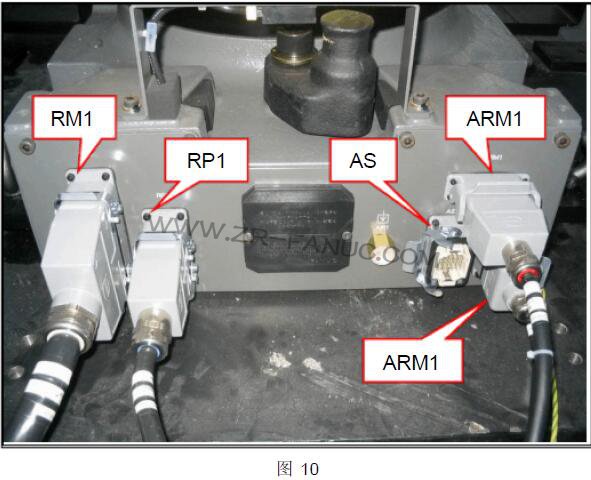
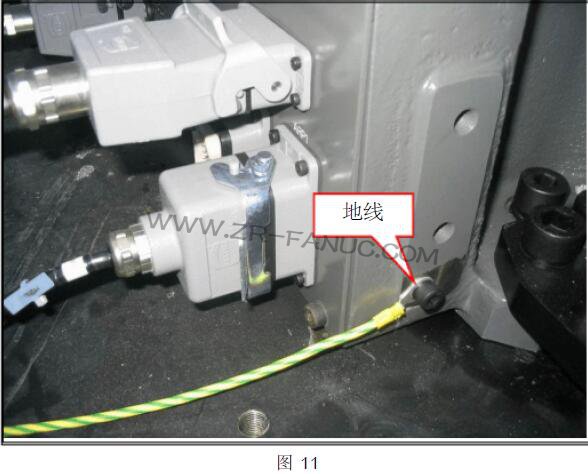
7)将RM,RP,AS,ARP,ARM,DP,DS 等电缆的HARDIN 插头插在机器人底座相应的插座上并扣好.将地线用内六角螺丝固定在机器人底座相应的位置上. (参见图10,图11)
8 机器人的TP 电缆与机器人示教盘相连接并拧紧接头(参见图12)

9)将机器人的BRAKER 置于OFF,将机器人电源电缆插头插在相应的电源插座上(参见图13,图14)

10)使用万用表在BRAKER 上装头处量取线电压和相电压,确认线电压和相电压与控制器门板上的标签以及机器人的Inspection data sheet中的数据一致, , 线电压的上下限应为额定电压的10%(参见图15)

11)释放操作箱和示教盘的急停按钮(参见图16,图17)

12)接通机器人电源,将机器人的BRAKER 置于ON,按POWER ON 按钮给机器人通电(参见图18,图19)
更多咨询:发那科机器人
